
教員紹介

山本 大介
教授
機械工学系1年生担任
機械工学系1年生担任
| 研究室名 | 自律移動ロボット研究室 |
|---|---|
| おもな研究テーマ | 屋外移動ロボット、不整地走行、複数ロボット協調 |
| 研究概要 | 掃除ロボットや配膳ロボットなど、家庭や店舗といった屋内を移動するロボットが普及しています。これらは、カメラ等のセンサで周囲の状況を認識し、予め持つ地図情報から移動経路を算出し、モータ等のアクチュエータを制御して移動します。加えて、屋外や地図のない場所でも自由に走り回る自律ロボットの研究開発に取り組みます。 |
| 担当授業 | 機械力学A・B、機構学、機械設計製図およびDTPD D、ものづくり基礎A・B、機械設計製作プロジェクトC、研究開発プロジェクト基礎、ゼミナールA・B、卒業研究 |
-
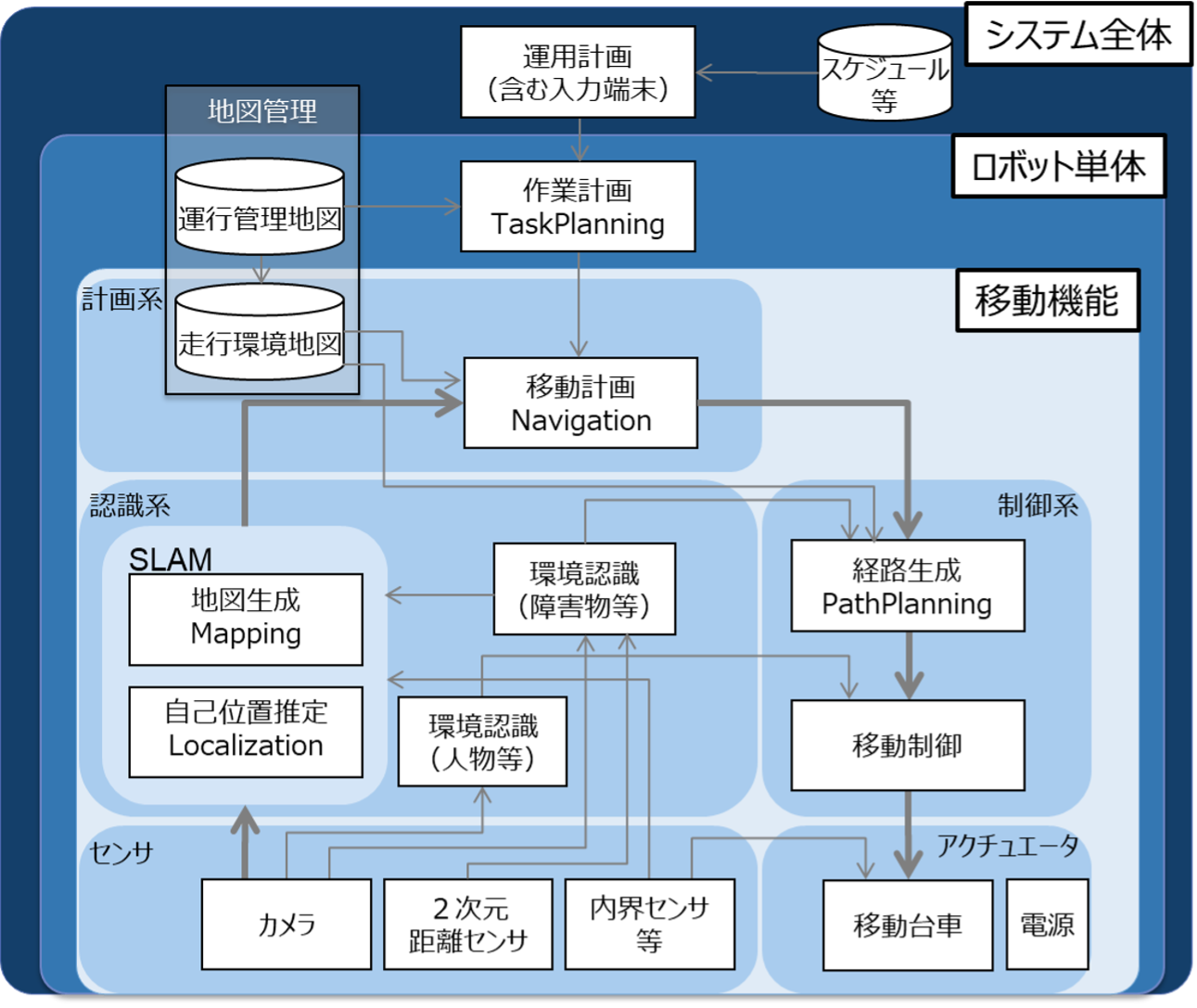
移動ロボットシステム構成 -